Calculadora de péndulo simple
Un péndulo es un cuerpo suspendido de un soporte fijo a través de una cuerda o varilla y que puede balancearse de un lado a otro debido a la influencia de la gravedad.
Las fórmulas matemáticas para describir el movimiento de los péndulos son complicadas. Sin embargo, pueden hacerse algunas suposiciones físicas para simplificar el problema.
El péndulo simple es un caso idealizado de un péndulo real para el cual podemos obtener fácilmente una fórmula que describa su movimiento.
Las suposiciones del péndulo simple son las siguientes:
- La masa del péndulo es una masa puntual.
- La cuerda que sostiene a la masa es de longitud constante y no tiene masa.
- El movimiento del péndulo está contenido en un plano.
- No existe ningún tipo de rozamiento.
A partir de estas suposiciones y considerando que el desplazamiento angular del péndulo es inferior a 1 radián (), puede calcularse que el ángulo del péndulo en un instante es igual a:
A partir de esta ecuación puede deducirse que el período del movimiento del péndulo es igual a:
Puedes utilizar la siguiente calculadora para obtener la longitud de la cuerda l, el período T, la frecuencia f o la fuerza de la gravedad g, a partir de las variables que conozcas. A continuación puedes encontrar la deducción matemática de las fórmulas del péndulo simple.
Fórmulas del péndulo simple
El movimiento de un péndulo simple es debido a la fuerza de la gravedad. Esto indica que podemos deducir su ecuación de movimiento teniendo en cuenta el peso del péndulo y la segunda ley de Newton.
Un primer paso para aplicar esta ley es descomponer la fuerza peso en la dirección de movimiento del péndulo.

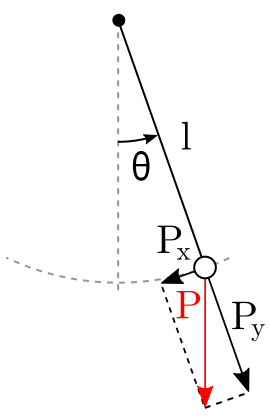

En esta imagen la dirección es la dirección de movimiento y es tangencial al círculo sobre el cual transcurre la trayectoria del péndulo. El peso del péndulo puede descomponerse en la dirección tangencial y la dirección normal:
En la imagen puede observarse que la componente del peso apunta en dirección opuesta al sentido positivo del ángulo . En consecuencia, la segunda ley de Newton correspondiente al eje puede escribirse como:
Además, sabemos gracias a las ecuaciones del movimiento circular uniformemente acelerado que la aceleración tangencial se puede escribir a partir de la aceleración angular () como:
Combinando estas dos expresiones obtenemos la siguiente ecuación diferencial:
Para valores muy bajos del ángulo, es decir, para , puede utilizarse la siguiente aproximación:
Introduciendo ahora esta relación en la ecuación anterior obtenemos:
Esta ecuación describe un movimiento armónico simple. Por lo tanto, podemos encontrar una solución con la forma:
Considerando primero la condición inicial , podemos deducir:
Teniendo en cuenta también que la velocidad inicial es igual a cero:
En consecuencia, la expresión del ángulo tiene la forma:
Finalmente, podemos introducir esta expresión en la ecuación diferencial que describe el movimiento del péndulo para deducir la fórmula de su frecuencia angular:
A partir de estas ecuaciones hemos deducido que un péndulo simple describe un movimiento armónico simple con una frecuencia angular igual a:
En consecuencia, el período del movimiento puede calcularse como: