Calculadora de movimiento circular
El movimiento circular es el movimiento de un cuerpo que sigue una trayectoria en forma de círculo.
Existen dos casos especiales de este tipo de movimiento. Uno es el movimiento con velocidad de magnitud constante, conocido como movimiento circular uniforme (MCU) y el otro es el movimiento circular cuya velocidad tiene una magnitud que varía con aceleración constante. Este segundo caso se conoce como movimiento circular uniformemente acelerado (MCUA).
Cuando se analiza el movimiento circular hay que tener claro en primer lugar que la aceleración es una magnitud vectorial. Esto significa que se define por su magnitud o módulo pero también por su dirección.
Un cuerpo que sigue un movimiento circular está siempre sometido a una aceleración. De lo contrario, la velocidad sería constante tanto en magnitud como en dirección y, en consecuencia, el cuerpo seguiría un movimiento rectilíneo.
En el movimiento circular uniforme la magnitud de la velocidad es siempre constante, pero no su dirección. La aceleración que produce este cambio de dirección actúa siempre perpendicularmente a la velocidad y se conoce como aceleración centrípeta.
Calculadora de movimiento circular uniforme
Con esta calculadora puedes calcular todas las magnitudes del movimiento circular uniforme a partir de las variables que conozcas:
Fórmulas del movimiento circular uniforme
El movimiento circular uniforme describe el movimiento de un cuerpo en una trayectoria circular con velocidad de magnitud o módulo constante.

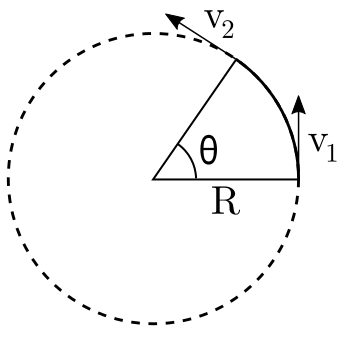

Esto significa que el fragmento de circunferencia recorrido por unidad de tiempo es constante. Sin embargo, el vector velocidad en cada punto tiene una dirección distinta y, por lo tanto:
Esta propiedad puede definirse mediante la velocidad angular, que se define como el ángulo girado por unidad de tiempo. Cuando la velocidad angular es constante podemos calcularla mediante:
Matemáticamente, la velocidad angular se define como la derivada del ángulo girado con respecto al tiempo:
En el análisis del movimiento circular es habitual expresar los ángulos en radianes (rad) y el tiempo en segundos (s). De este modo, la velocidad angular suele expresarse en unidades de rad/s.
La velocidad angular es una magnitud importante porque está directamente relacionada con el período del movimiento. Concretamente, la velocidad angular () y el período () están relacionados mediante:
También es posible calcular la velocidad lineal o tangencial del cuerpo (es decir, expresada en metros por segundo) si conocemos el radio () de la trayectoria. En este caso, velocidad angular y velocidad tangencial se relacionan a través de la igualdad:
Es importante recordar que el único efecto de la aceleración en el movimiento circular uniforme es un cambio en la dirección del vector velocidad. Esta aceleración apunta siempre hacia el centro del círculo, es perpendicular a la velocidad y se conoce como aceleración centrípeta (). Podemos calcular su magnitud a partir de la velocidad lineal y el radio de la trayectoria:
O de forma equivalente, podemos expresarla en función de la velocidad angular como:
Por último, podemos calcular la posición angular en cualquier momento si conocemos la posición angular inicial () y la velocidad angular ():
Calculadora de movimiento circular uniformemente acelerado
Las siguientes calculadoras te permiten resolver problemas de movimiento circular uniformemente acelerado a partir de variables conocidas.
En esta primera calculadora puedes calcular el ángulo y la velocidad angular en un instante de tiempo si conoces el ángulo inicial , la velocidad angular inicial y la aceleración angular .
En la segunda calculadora puedes obtener la velocidad lineal del cuerpo , la aceleración tangencial y la aceleración centrípeta en un instante dado, si conoces la velocidad angular , la aceleración angular y el radio de la trayectoria.
Fórmulas del movimiento circular uniformemente acelerado
El movimiento circular uniformemente acelerado (MCUA) es un movimiento circular en el que existe una aceleración angular constante que produce un cambio uniforme en la velocidad angular.
Esto significa que la velocidad lineal del cuerpo aumenta o disminuye constantemente, en función de si la aceleración angular es positiva o negativa.
De un modo similar al movimiento rectilíneo uniformemente acelerado (MRUA), en el MCUA la velocidad angular aumenta o disminuye a un ritmo constante determinado por la aceleración angular (). Esto significa que podemos calcular la velocidad angular en todo momento mediante la expresión:
De forma equivalente al MRUA, la posición angular () del cuerpo en la trayectoria circular en un instante puede determinarse a partir de la velocidad angular inicial y la aceleración angular mediante:
Estas dos ecuaciones describen completamente el movimiento circular uniformemente acelerado. También es posible combinar las fórmulas anteriores para generar nuevas expresiones de la posición angular a partir de otras variables.
Por ejemplo, podemos reescribir la primera ecuación como:
y calcular ahora la posición angular en función de la velocidad angular inicial y la velocidad angular final:
De forma similar, podemos escribir:
Y si sustituimos ahora esta relación en la fórmula de la posición angular podemos expresar en función de la velocidad angular final y la aceleración angular:
Por último, podemos hacer la sustitución en términos de la variable tiempo. En este caso, empezamos con:
Introduciendo ahora esta igualdad en la fórmula de la posición angular obtenemos una relación entre todas las variables independientemente del tiempo:
En el movimiento circular uniformemente acelerado también es interesante conocer la aceleración tangencial, es decir la aceleración con la que aumenta o disminuye la velocidad lineal del cuerpo. Esta aceleración puede calcularse a partir de la aceleración angular y del radio de la trayectoria como:
Al igual que en el caso del movimiento circular uniforme (MCU), la aceleración normal o aceleración centrípeta se calcula en este caso con la misma fórmula, es decir:
Por último, también podemos calcular la velocidad lineal del cuerpo con la misma fórmula que en el caso del MCU:
A modo de resumen, las fórmulas más útiles para analizar el movimiento circular uniformemente acelerado son las siguientes: